

返回首页 > 产品介绍 > SOFTmatics™ 柔性夹爪 > SOFTmatics™ 柔性夹爪
机器人柔性夹爪SOFTmatics™
(ソフマティックス™)

轻轻地捏住 · 包裹住不定形的 · 散乱开的 · 易压碎的物品

霓达的SOFTmatics机器人柔性夹爪通过独特的把持机构,可以轻柔地包裹和把持不成形、容易破损的物品
通过减压驱动夹持器,再通过复压来使它恢复到打开状态
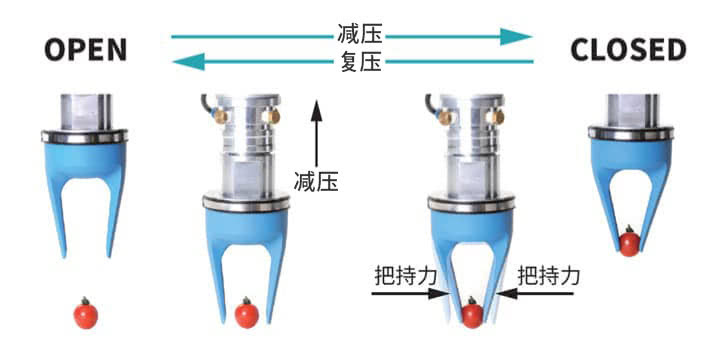
轻巧地抓取食品,独特的夹持机构可实现平稳运动。可对应柔软食品的抓取以及各种形状大小食品的抓取。

不成形物品的搬运

可以对应不同形状工件的追踪

柔软的物品的搬运
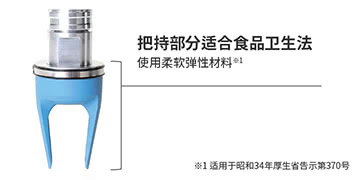
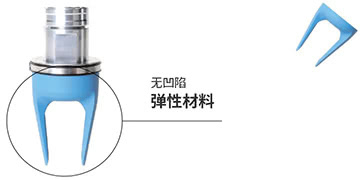
使用符合食品卫生的材料。同时,握持部分易于清洗。
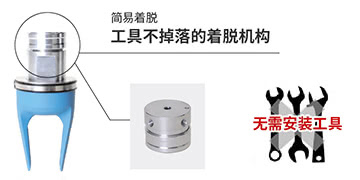
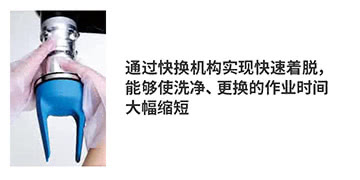
采用了无需工具的拆装机构,清洗和替换时能简单可靠的进行拆装。
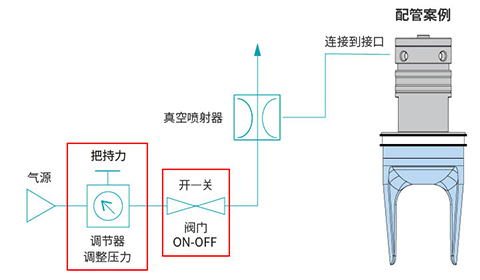
阀门ON/OFF能够控制夹爪的开合。
通过改变压力和流量,来调整把持力和开合时间。


采用柔软的弹性体和减压驱动,可轻松、安全地用于工作环境和工件、工人使用时也更安心。

具有各种不同尺寸的、带有包裹住、夹住、捏住等功能的各种式样的夹持方式。






